Design of an Autonomous Quadruped Robot for Complex Terrain Navigation
Developing a quadruped robot capable of self-balancing and agile locomotion on uneven terrain.


Project Overview
This project focuses on designing and fabricating a quadruped robot capable of agile and stable locomotion across complex terrains. With high-precision servo motors and an integrated Inertial Measurement Unit (IMU), the robot maintains balance and adapts its posture in real-time based on environmental feedback.
Key features include:
• Gait Algorithms: Implements various gait patterns such as trot, crawl, and wave gait to adapt to different surfaces and movement strategies.
• Terrain Adaptability: Capable of walking forward/backward, turning, and overcoming small obstacles, while maintaining stability against external forces.
• Research Integration: Serves as a platform for biomechanics research, autonomous navigation, and real-time control experiments.
🔧 Structure and Operating Principles
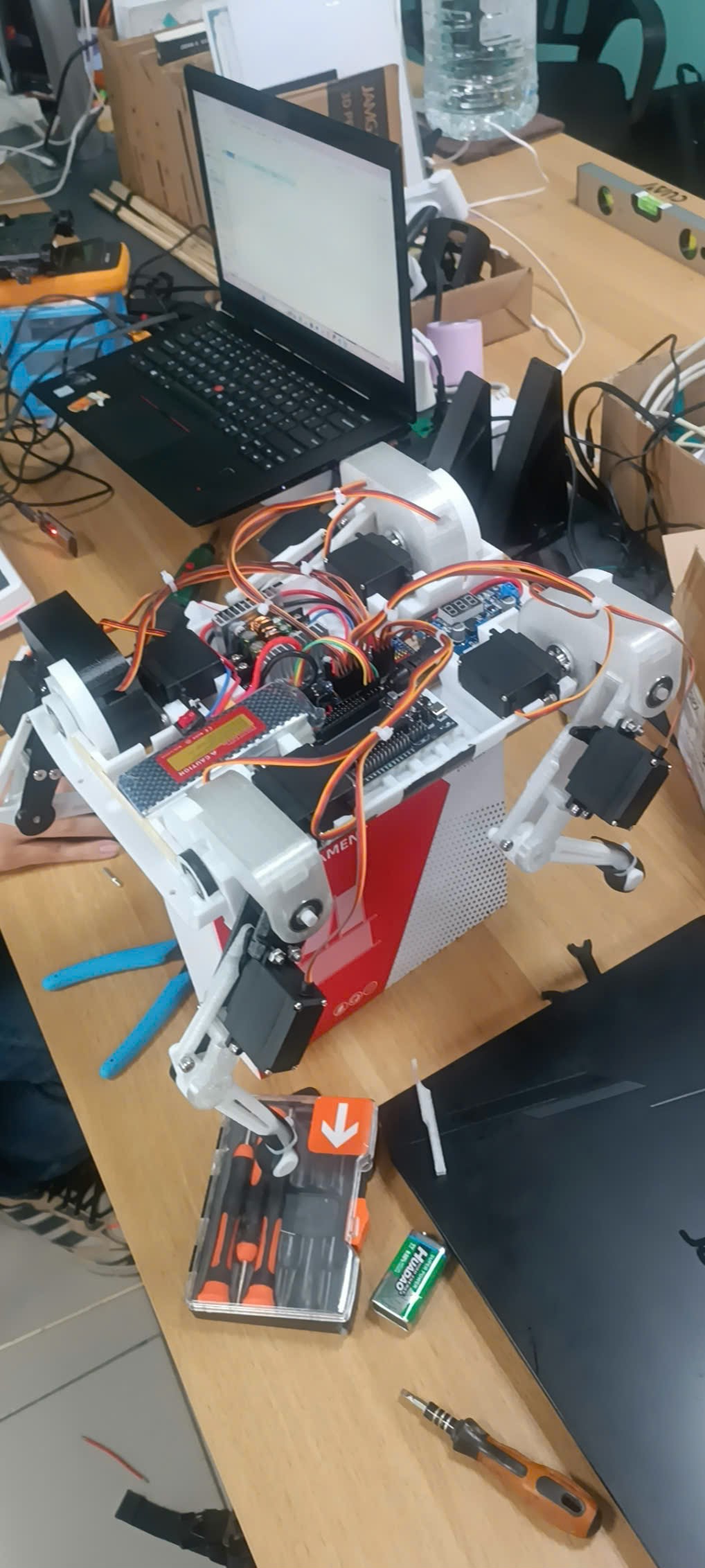
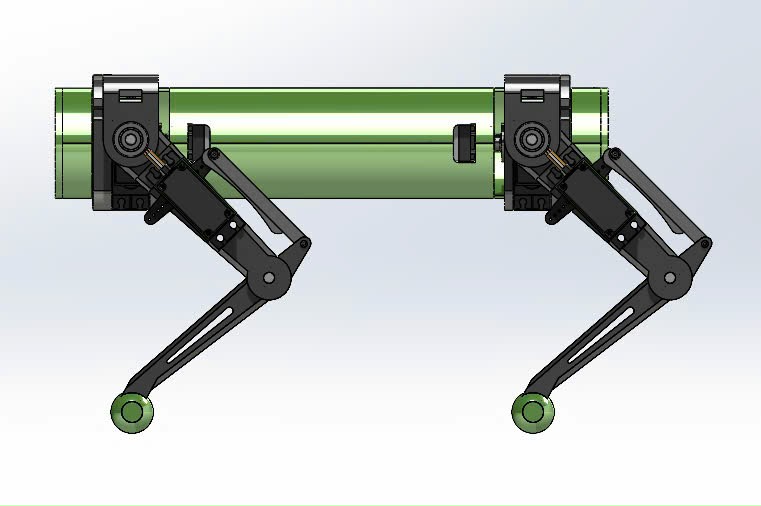
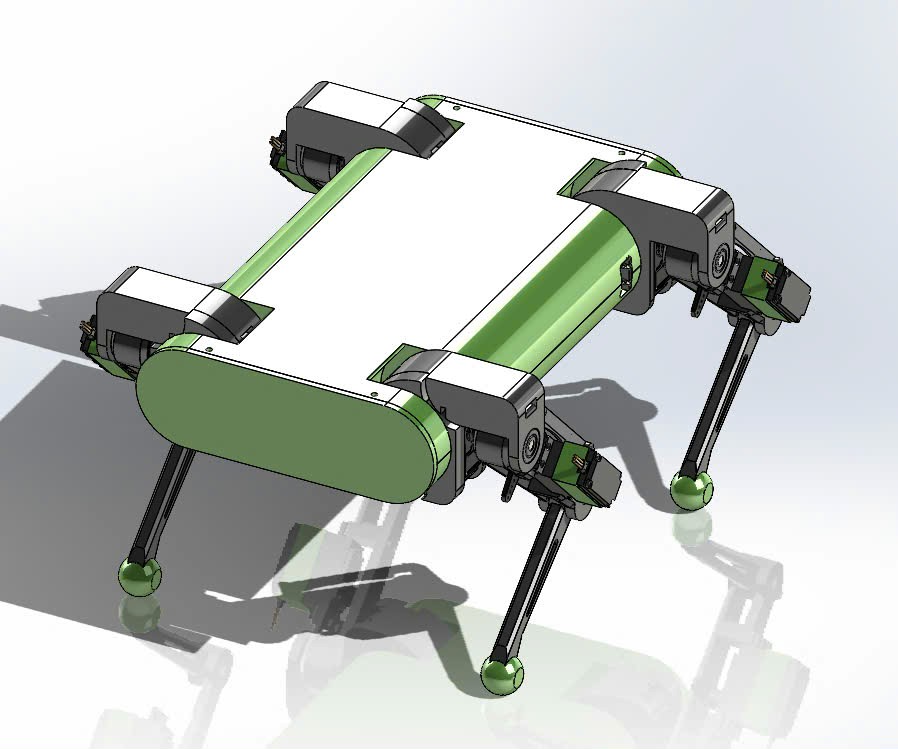
**1. Mechanical Components**
• **Main Body Frame System**: Central chassis that houses control boards and connects to all limbs.
• **Leg Locomotion Assembly**: Mechanical structure comprising joints, servo actuators, and linkages for each leg.
• **Central Controller**: ESP32-WROOM-32 microcontroller providing wireless connectivity and real-time control.
**2. Software and Electronics**
• **Development Tools**: Arduino IDE and VS Code used for firmware development.
• **Sensors**: Includes a 10-DOF IMU (ADXL345, ITG3200, VCM5883L, BMP085) for attitude estimation. Future plans include LiDAR or 3D vision for localization and obstacle perception.
• **Programming Framework**: Utilizes ROS (Robot Operating System) for motion control, sensor integration, and algorithm development.
**3. Algorithms**
• **Kinematics**: Robot links are defined using Denavit-Hartenberg (D-H) parameters to solve forward and inverse kinematics.
• **Transformation Matrices**: Homogeneous transformation matrices are applied to determine the position and orientation of the robot's limbs in space.
• **Control Strategy**: PID or trajectory-based controllers ensure smooth joint motion and posture stabilization.
📈 Applications
• STEM education and robotics courses.
• Biomechanics and multi-legged locomotion research.
• Development of AI-based autonomous robotics platforms.
📚 References
• DFRobot 10-DOF IMU Wiki (V2.0 & V1.0)
• Sensor datasheets: ADXL345, ITG3200, VCM5883L, BMP085, BMP280
• ROS Documentation & Arduino-ROS libraries
Key Benefits
- Supports agile walking on uneven terrain using multiple gaits (trot, crawl, wave).
- Maintains stability and balance using IMU feedback and kinematic algorithms.
- Flexible and modular mechanical design allows quick customization and upgrades.
- ROS framework enables research-level motion planning and sensor integration.
- Ideal for STEM education, robotics research, and AI-enhanced control development.