GeoScout – High‑Performance 3D LiDAR Integration for Indoor UAV Logistics
Real‑time acquisition and processing of SICK multiScan100/136 LiDAR data on NVIDIA Jetson Orin via a custom C++ ROS 2 driver.

Project Overview
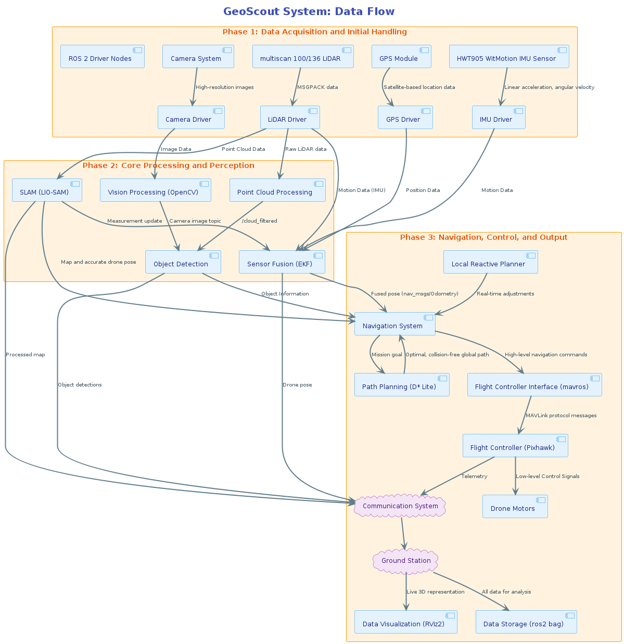
Modern warehouse and logistics operations require accurate 3D perception in GPS‑denied indoor spaces, yet UAVs struggle with both high‑volume sensor data and environment constraints. GeoScout addresses these challenges by:
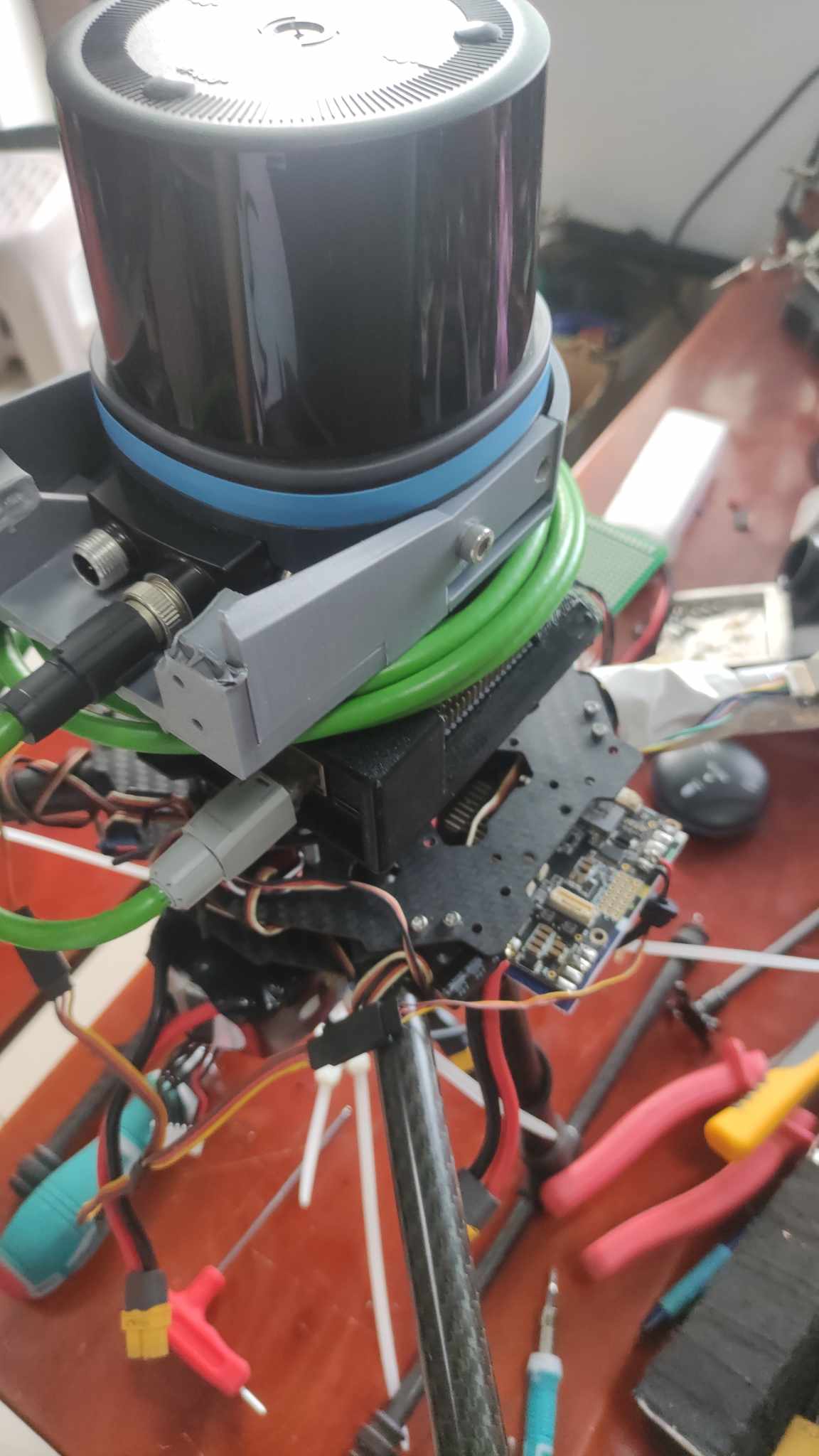
• Integrating the SICK multiScan100/136 3D LiDAR with an NVIDIA Jetson Orin 8 GB embedded computer under ROS 2 Humble.
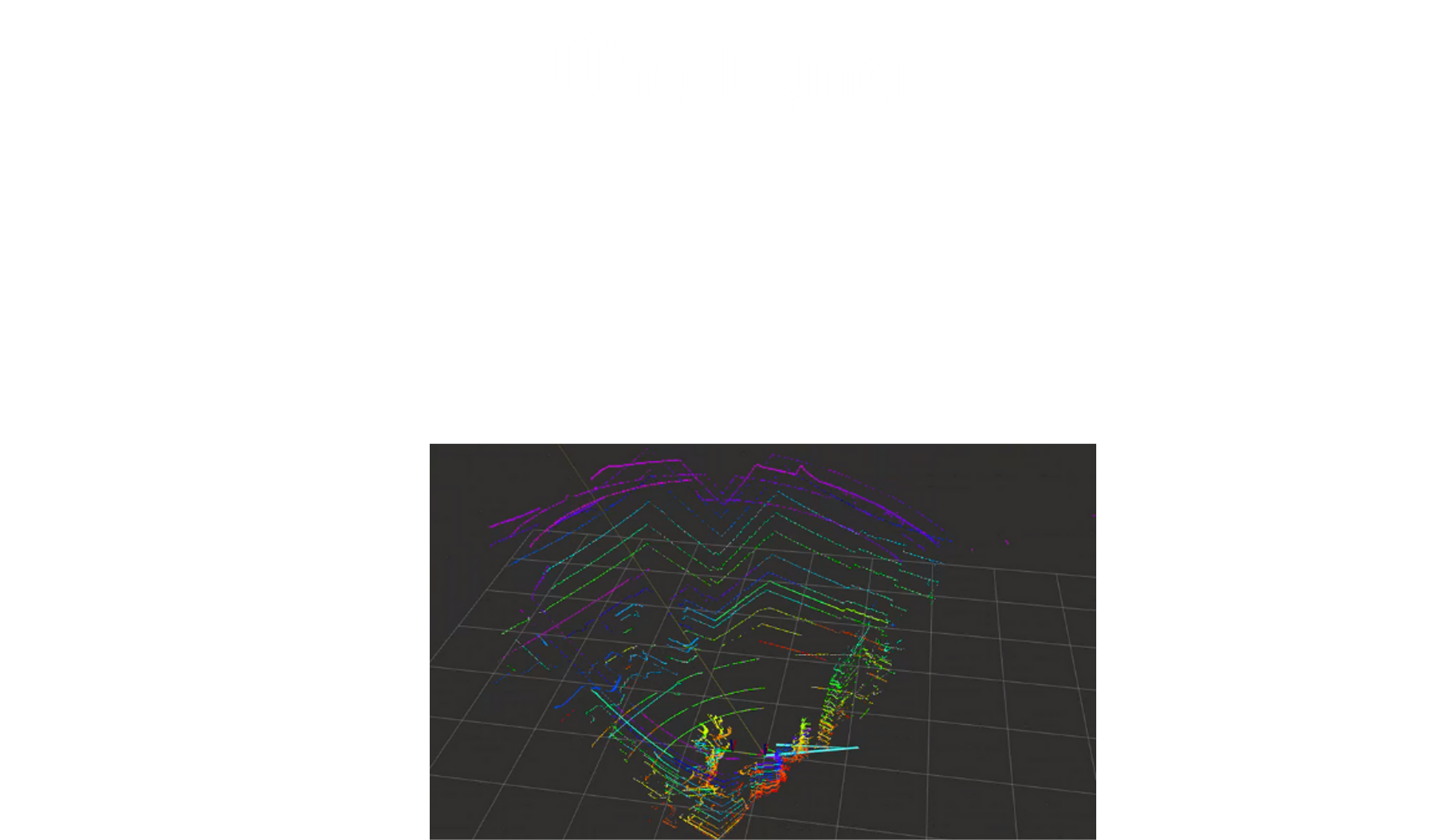
• Providing a custom C++ driver that receives raw UDP packets, deserializes proprietary MSGPACK streams (via msgpack‑c), transforms polar coordinates (range, azimuth, elevation) into Cartesian (X, Y, Z), and publishes standard sensor_msgs/msg/PointCloud2 messages on `/lidar/points`.
• Achieving low resource usage on the Jetson Orin (total system load ∼20% CPU, ∼165 MB RAM) while delivering real‑time point‑cloud visualization in RViz2.
Key Benefits
- Enables real‑time 3D point‑cloud acquisition and publishing at low CPU (<20%) and memory (<170 MB) overhead.
- Transforms proprietary MSGPACK LiDAR data into standard ROS 2 PointCloud2 messages for seamless integration.
- Lays the groundwork for future SLAM, AI‑based object recognition, and fully autonomous inventory management.
- Operates reliably in GPS‑denied indoor environments, expanding UAV utility in warehouses.
- Scalable C++ ROS 2 driver design supports rapid deployment across heterogeneous embedded platforms.